FAQs sobre robolink® W – Kit de construcción para articulaciones robóticas
Preguntas frecuentes
1) ¿Qué articulaciones igus® están disponibles directamente desde almacén?
Actualmente están disponibles 6 tipos de articulaciones
1 – RL-50-PL1: articulación estrictamente giratoria2 – RL-50-TL1: articulación estrictamente rotatoria
3 – RL-50-001: articulación de 2 ejes con +/-90° de rango de giro (clásica)
4 – RL-50-002: articulación de 2 ejes con +130°/-50° de rango de giro (asimétrica)
5 – RL-50-003: articulación de 2 ejes con +180°/0° de rango de giro (mociones abatibles)
6 – RL-90-BL1: articulación básica de 2 ejes, (grande y potente)
También es posible solicitar articulaciones a medida.
2) ¿Qué ángulos permiten? ¿Cuánto pesan? ¿Qué par de fuerzas ofrecen?
En la siguiente tabla encontrará la información básica sobre las articulaciones igus®. También está disponible en nuestro catálogo.| Número de pedido | Número de cables |
Ángulo pivotante |
Ángulo rotatorio |
Peso | Carga máx. | ||||
|---|---|---|---|---|---|---|---|---|---|
| Accionamiento incorporado |
Accionamiento opcional |
Estándar (con tope) |
Opcional (*sin tope) |
Estándar (con tope) |
Opcional (*sin tope) |
[gr] | Pivotante [Nm] |
Rotatorio [Nm] |
|
| 1º Articulación pivotante RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. Articulación rotatoria RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3º Articulación |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4º Articulación |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5º Articulación de 2 ejes RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6º. Articulación básica RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) ¿Cómo pueden combinarse las articulaciones?
Cada articulación está equipada con cables metálicos que deben guiarse hacia la siguiente articulación situada debajo. Esto hace que no todas las combinaciones sean posibles. Sin embargo, es posible combinar articulaciones individuales de 1 a 6 DOF e implementar cinemáticas muy diferentes. En todo caso, nuestros técnicos estarán encantados de asesorarle siempre que lo necesite. La siguiente imagen muestra algunas de las infinitas combinaciones posibles incluyendo los nuevos modelos de articulaciones, como el RL-50-003 y el RL-90-BL1.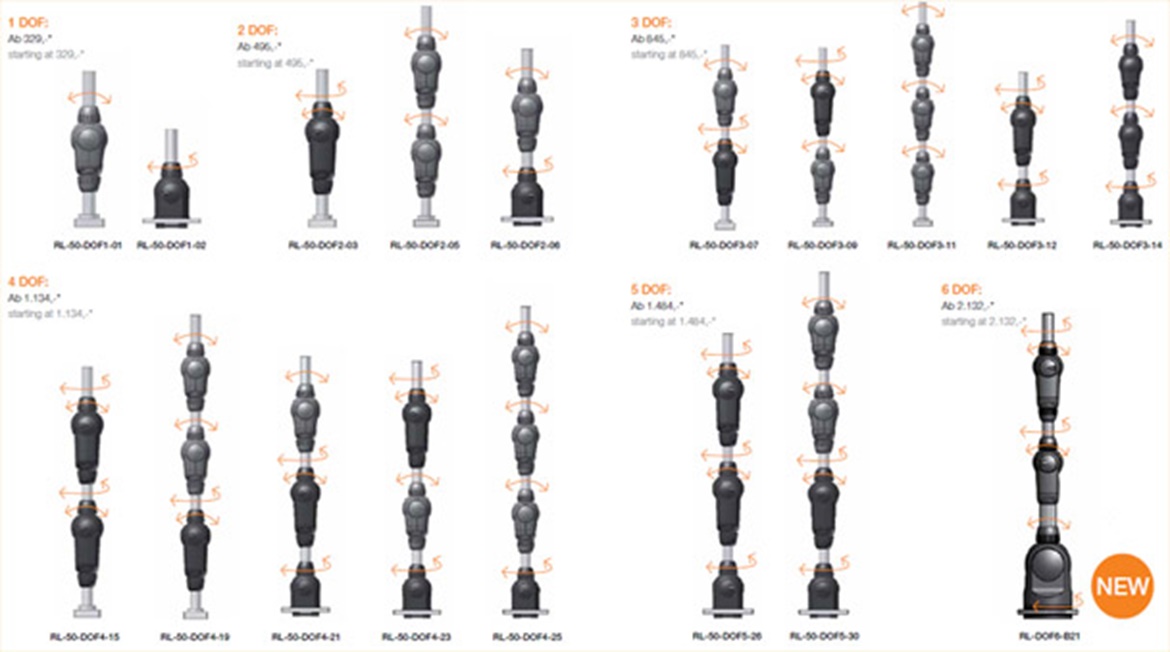
4) ¿Qué significa «kit de construcción modular»?
igus® ha desarrollado el kit construcción robolink® igus® con el objetivo ofrecer a sus clientes el acceso a componentes individuales mecánicos para construir su propio sistema robótico. En función de la complejidad del modelo pueden configurarse y solicitarse brazos articulados de varios grados de complejidad. igus® produce brazos de acuerdo con los requisitos de sus clientes y suministra sistemas listos para conectar. Sin embargo, conectar articulaciones no resulta tan sencillo como juntar las famosas piezas de LEGO®.5) ¿Por qué no es posible reconfigurar los brazos articulados de forma simple?
Todas las articulaciones operan con cables metálicos. Por cada grado de libertad se necesitan 2 cables (principio antagónico). Si los cables de una articulación (2) se pasaran por la articulación situada debajo sin una guía (1), el movimiento de cada una ya no sería independiente del de la otra. Para conseguir esta independencia es necesario que el cable de la articulación superior (2) esté desacoplado de la moción de la articulación inferior (1). Esto se consigue con un sistema especial con cables Bowden situados en la apertura de la articulación inferior (véase la ilustración a continuación). De esta manera los cables se mueven libremente uno al lado del otro en el interior de los tubos que conectan las diferentes articulaciones.Los brazos robóticos multieje de igus® siempre se suministran con el sistema con cables Bowden montado y el robot listo para instalar con todos los cables y tubos configurados como se desee.

Manguera neumática (pinza)
2Sistema cuádruple de cables Bowden
3Cable de sensor - articulación 2
4En el tubo se mueven 4 cables libremente
5Sistema individual de cables Bowden para rotación
6En el tubo se mueven 8 cables libremente
6) ¿Qué longitudes/fuerzas de los cables se necesitan para mover las articulaciones?
El punto de trabajo de los cables en el interior de la articulación depende del tamaño:RL-50: diámetro efectivo: 50 mm (moción rotatoria y pivotante)
RL-90: diámetro efectivo: 90 mm (moción pivotante), o 120 mm (moción rotatoria)
Para una articulación RL-50, el cable se calcula de la siguiente forma
π x d/4 ≈ 39 mm para un ángulo de 90°
π x d/2 ≈ 79 mm para un ángulo de 180°
La fuerzas de los cables (dependiendo del par de fuerzas) puede llegar a ser de hasta 600 N.
7) ¿Qué componentes se incluyen al solicitar una articulación robótica?
Articulación robótica en plástico (PA 2200), montada y con cojinetes (aluminio anodizado duro = estándar)
Cables Dyneema
Barras de aluminio (estándar = 100 mm cada una, longitudes especiales bajo petición)
Sensores de ángulo opcionales (-WS), cable de sensor de 3 m, confeccionado y probado. Niples como elementos de conexión y sin costes adicionales acorde con los requisitos del cliente.
8) ¿Qué componentes se incluyen al solicitar un brazo articulado?
Articulaciones montadas tal y como se indica en la pregunta 7
Cables guiados a través del sistema especial de cables Bowden tal y como se indica en la pregunta 5
Tubos de aluminio para la conexión de articulaciones confeccionados a medida
Placa de montaje en la base del brazo robótico
Cables de sensor guiados(WS opcional), confeccionados y probados de 3 m cada uno. Niples como elementos de conexión y sin costes adicionales acorde con los requisitos del cliente.
9) ¿Qué componentes se incluyen al solicitar un «sistema robótico completo»?
Un brazo articulado como el descrito en la pregunta 6, pero con una unidad de accionamiento MIT adicional que consiste en:Motores paso a paso igus® (cantidad en función de la cantidad de ejes del brazo)
Un reductor planetario para cada motor
Rueda de accionamiento para conectar los cables al accionamiento
Herramienta de tensión para retensar la rueda de accionamiento
Disponibles varios modelos de carcasas para los motores y la base del brazo robótico
Los siguientes componentes NO están incluidos:
Pinzas y otros accesorios (disponibles en igus®)
Sistemas de control
Cables de motor (disponbles en igus®)
10) ¿Qué sensores de ángulo se utilizan?
De forma opcional las articulaciones pueden equiparse con sensores de ángulo incremental de Austriamicrosystems (AS5304A). De momento, los encoders absolutos no son técnicamente aptos. Para definir la posición inicial se utiliza un sensor Hall situado en el punto donde se realizan los movimientos pivotantes o rotatorios de la articulación. Esto significa que, en primer lugar, cada articulación tiene que colocarse a su posición de «inicio» al encenderse. Encontrará más información sobre el cableado de los sensores y la asignación de los cables en nuestros documentos técnicos.La resolución de los encoders es la siguiente (varía en función de cada articulación):
4.640 señales / 360° en el caso de movimientos rotacionales del tamaño de la articulación RL-50
(29 pares de polos x 160 señales/pares de polos) ≈ 0,078°
4.960 señales / 360° en el caso de los movimientos pivotantes del tamaño de la articulación RL-50
(31 pares de polos x 160 señales/pares de polos) ≈ 0,073°
9.920 señales / 360° en el caso de todos los movimientos del tamaño de la articulación RL-90 («Base»)
(62 pares de polos x 160 señales/pares de polos) ≈ 0,036

Sensor Hall para moción rotatoria
2Encoder para movimientos rotatorios
3Encoder para movimientos pivotantes
4Sensor Hall para moción rotatoria
Sensores de ángulo incremental magnético. Los sensores tienen una resolución de ~0,07° por eje. Todas las unidades de sensor están listas para instalarse en las respectivas articulaciones. Cada una con un cable de sensor de 3 m (6 cables por DOF)
11) ¿Los brazos articulados pueden utilizarse bajo el agua?
Sí, los componentes principalmente están fabricados de plástico (PA2200), aluminio anodizado, acero inoxidable (tornillos), cables Dyneema (PE) y niples de bronce. También pueden solicitarse sensores con una versión apta para aplicaciones en contacto con agua (-ES= encoder sellado).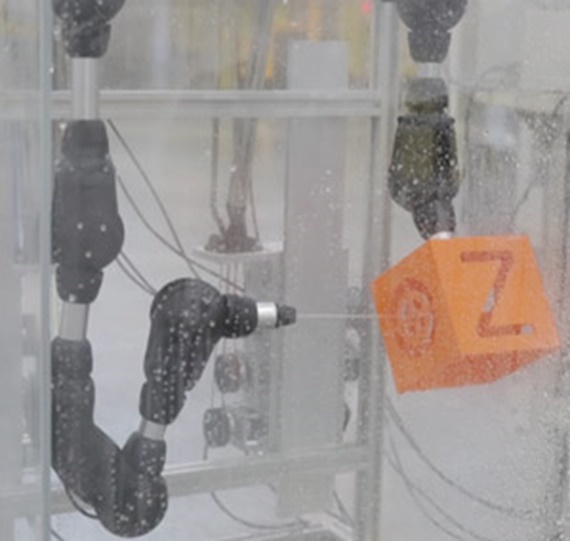

12) ¿Qué tipos de accionamiento están disponibles?
Para el movimiento de los cables pueden utilizarse una gran cantidad de accionamientos. Entre otros, accionamientos manuales (palancas), componentes neumáticos (músculos neumáticos) o motores eléctricos (motores BLDC, motores DC, motores de servo,motores lineales, motores paso a paso). igus® también ofrece la opción de solicitar motores paso a paso con un reductor planetario. Actualmente están disponibles los siguientes:- NEMA23 motor paso a paso (versión cable trenzado o conector) con reductor planetario 1:16
- NEMA17 motor paso a paso (versión cable trenzado o conector) con reductor planetario 1:35
Motor paso a paso
2Reductor planetario
3Rueda de accionamiento tensionable

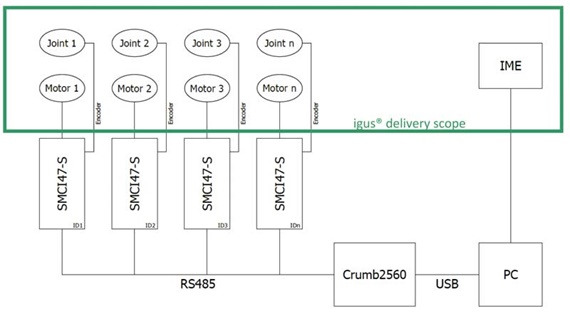
13) ¿Cómo se controlan los brazos articulados robolink®?
igus® no desarrolla, construye ni suministra sistemas de control. El alcance de suministro del sistema robolink® se limita a brazos articulados y unidades de accionamiento.La obtención o producción de sistemas para el control de componentes deberá hacerse de forma externa.
14) ¿Qué se necesita para poder utilizar el programa de código abierto IME (editor de movimiento de igus®)?
Este programa puede descargarse de forma totalmente gratuita. Se trata de una interfaz gráfica de usuario que permite programar y guardar movimientos simples. El control del perfil (o la cinemática inversa) no está incluido.15) ¿Qué materiales se utilizan?
Articulaciones: Componentes de poliamida PA 2200, tornillos de acero inoxidable, cojinetes hechos de aluminio anodizado duro, iglidur® J o acero inoxidable.Tubos conectores: Aluminio anodizado o GRP/CRP como alternativas
Cables:Cables Dyneema, niples de bronce para los extremos de cables.
16) ¿Qué tipo de pinzas pueden utilizarse?
Los brazos robóticos de igus® permiten el uso de cualquier tipo de pinza. Sin embargo, debido a la relativamente baja capacidad de carga del sistema, las pinzas deben ser lo más ligeras posibles. En el mercado existe una amplia gama de pinzas neumáticas de peso ligero. Por ejemplo, pinzas de las compañías SCHUNK, FESTO o FIPA. Si se prefiere no utilizar componentes neumáticos, como es habitual, pueden utilizarse pinzas eléctricas. En el mercado hay una gran variedad de pinzas eléctricas de peso muy ligero, por ejemplo GIMATIC, SCHUNK o SOMMER (sin embargo, su precio es considerablemente superior al de las pinzas neumáticas simples). igus® suministra pinzas plásticas simples desde 2013 cuyo motor se encuentra en el interior del tubo robolink®. Asimismo, también ofrece la opción de diseñar las mordazas a medida.17) ¿Qué precio tienen las articulaciones y los sistemas?
En nuestro catálogo encontrará los precios de todos los sistemas y articulaciones individuales. Por norma general, un sistema completo con motores, reductores, carcasas, articulaciones y sensores cuesta poco más de 1.000 € por eje. Por ejemplo, un sistema con 6 grados de libertad (DOF) cuesta 6.000 €. El coste de un brazo articulado SIN motores (pero con sensores) es de aproximadamente la mitad (500 €/eje). Ejemplo:6 DOF ~ 3.000 €

6 DOF ~ 6.000 €


_270x270_135x135.jpg)