Cambiar idioma :
El software igus Robot Control
Programe, simule y controle robots de forma gratuita
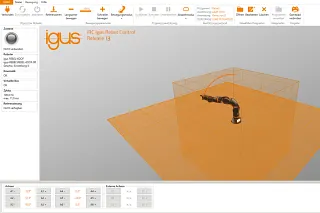
igus Robot Control facilita la programación y control de robots, permitiendo un acceso rápido y sencillo al mundo de la automatización. Gracias a su diseño modular, es compatible con diferentes cinemáticas robóticas, incluyendo robots Delta, robots lineales y robots de brazo articulado. El software puede utilizarse para simular los distintos movimientos del robot en la interfaz 3D, sin necesidad de que el sistema esté conectado.
Lo que encontrará en esta página:
Software gratuito para robots
Ejemplos de programación de diversas aplicaciones con el software.
- Conexión sencilla entre el robot y el sistema de control
- Diseño intuitivo con interfaz 3D y gemelo digital que permite la ejecución directa y la comprobación de secuencias de movimiento
- Posibilidad de configurar la interfaz de la cámara directamente a través del sistema de control y el software
- Programación de robots Delta, lineales, SCARA y de brazo articulado
- Posibilidad de realizar una prueba antes de la compra
Requisitos del sistema:
- PC con sistema operativo Windows 10
- Comunicación a través de Ethernet o WLAN
- 500 MB de espacio libre en el disco duro
Programas de muestra, wiki y formación



Interfaces
Interfaz PLC
La interfaz PLC (Controlador Lógico Programable) permite ejecutar funciones básicas y comunicar estados a través de entradas y salidas digitales. Además de su control mediante PLC, esta interfaz también facilita la operación a través de botones físicos.
Entradas y salidas digitales
Los programas de robot pueden cargarse e iniciarse, así como enviar comandos a la pinza, utilizando entradas digitales o señales globales. Esta funcionalidad resulta especialmente útil para seleccionar programas en función de una opción determinada, ya sea mediante botones físicos o la instrucción CRI-GSig.
Modbus TCP/IP
La interfaz Modbus permite enviar datos e instrucciones desde el PLC al sistema de control del robot, así como recibir información sobre su estado, entre otras funciones.
Interfaz IRC
La interfaz CRI permite transmitir instrucciones complejas y recuperar información y configuraciones a través de la conexión Ethernet utilizando el protocolo TCP/IP. El igus Robot Control emplea esta interfaz para conectarse tanto a robots con sistemas de control integrados como a otras unidades dentro del sistema de control.
Interfaz de cámara
La interfaz Cámaras permite utilizar cámaras de detección de objetos y vídeo. Las cámaras de detección de objetos identifican la posición y la categoría de los objetos, y transmiten esta información —opcionalmente acompañada de una imagen de vídeo— al sistema de control. A partir de las posiciones proporcionadas por la cámara, el sistema de control calcula las coordenadas correspondientes en el sistema del control. Las cámaras de vídeo únicamente transmiten imágenes, por lo que sólo pueden utilizarse para supervisar el área de trabajo, pero no para la detección de objetos.
Interfaz en la nube
La interfaz Nube permite supervisar el robot a través de RobotDimension. Una vez activado e iniciada la sesión, el robot envía información básica sobre su estado, asi como imágenes de la cámara, al servicio online. El usuario puede visualizar la lista de sus robots en el sitio web y recuperar la información correspondiente.
ROS, Matlab, LabView y muchos más
Integre los robots en su entorno ROS. Documentación y paquetes para la comunicación de hardware, Teleop y moveI.
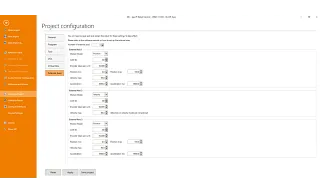
Configuraciones de proyectos
Pinza
En este apartado se puede especificar la herramienta instalada. Para cambiar el efector final, es necesario volver a cargar el proyecto o reiniciar el sistema de control integrado. Los nuevos dispositivos pueden añadirse como un archivo de configuración ubicado en el directorio Datos/Herramientas.
Caja virtual
El movimiento del brazo del robot se restringe dentro de un área delimitada en forma de caja. Esta función previene daños mecánicos y simplifica la programación, adaptándose a las necesidades de cada aplicación. Si un programa supera los límites de la caja virtual, se detiene automáticamente y se muestra un mensaje de error.
Ejes externos
El sistema igus Robot Control admite hasta 3 ejes adicionales (también llamados ejes externos en iRC) que se pueden asignar en función de los ejes del robot y configurar en el área de ajustes de iRC.

Programa
En este apartado puede definir el robot y el programa lógico, ajustar la velocidad de movimiento (como porcentaje de la velocidad máxima), seleccionar el modo de ejecución y configurar la respuesta ante errores del programa.
Cinemática especial
El sistema de control se puede personalizar para su robot mediante un gemelo digital. Configuramos la cinemática inversa para ajustarla específicamente a su proyecto.
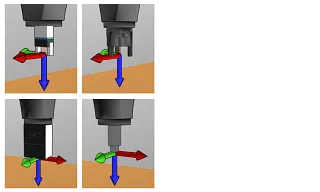
Programación
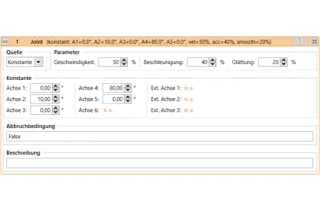
Movimientos de ejes
El comando Joint desplaza el robot hacia una posición objetivo absoluta definida en coordenadas de eje (por ejemplo, ángulo de un eje o posición de un eje lineal). El recorrido resultante del TCP generalmente describe una trayectoria curva, en lugar de una línea recta.
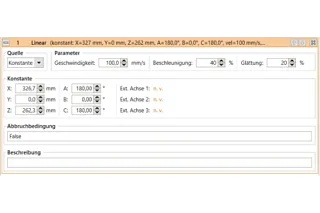
Movimientos lineales
El comando Lineal desplaza el robot hasta una posición objetivo absoluta definida en coordenadas cartesianas, haciendo que el TCP se mueva en línea recta.
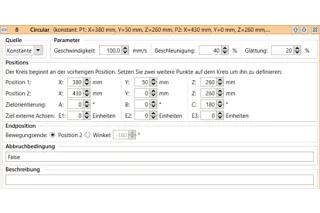
Movimientos circulares
El comando Circular permite realizar movimientos a lo largo de una trayectoria circular total o parcial. Es compatible con movimientos lineales, de lo que permite suavizar la transición hacia estos movimientos.
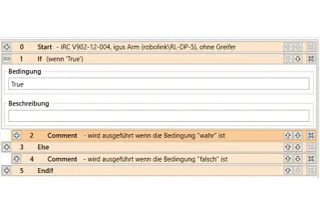
Condiciones
Las condiciones pueden aplicarse en comandos if-then-else, bucles y como criterios de cancelación en comandos de movimiento. Pueden consistir en combinaciones de entradas digitales, señales globales, operaciones booleanas y comparaciones.
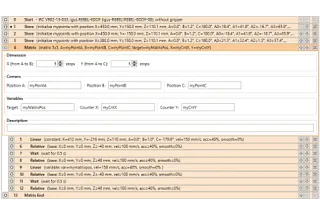
Cálculo de matrices
Las instrucciones de rejilla calculan posiciones alineadas a una cuadrícula, como los puntos de agarre o de depósito en tareas de paletizado.
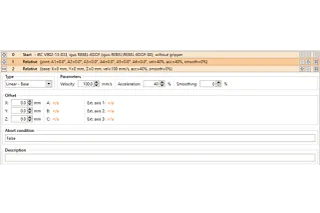
Relativo
El comando Relativo permite mover el robot con respecto a su posición actual. Se puede acceder a él en el menú Acción → Movimiento relativo.

Subprogramas
Los subprogramas se pueden llamar utilizando el subcomando. La ruta al archivo del subprograma se especifica en Nombre de archivo. Esta ruta es relativa a la subcarpeta Programas dentro de la carpeta Datos del iRC.
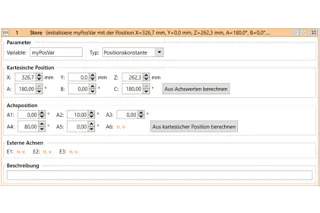
Variables y acceso a ellas
En el programa para igus Robot Control y TinyCtrl se admiten dos tipos de variables:
- Variables numéricas: Permiten almacenar tanto números enteros como valores de coma flotante.
- Variables de posición: Se utilizan para almacenar tanto posiciones cartesianas como posiciones de articulaciones. La interpretación de la variable, ya sea como posición cartesiana o de articulación, depende del contexto en que se emplee.
Descargar software para robots

El software igus Robot Control, que no requiere licencia, está integrado en el sistema de control y, por lo tanto, utiliza un concepto operativo estandarizado y servicios de comunicación coherentes para muchos componentes de un sistema. Esto significa menos trabajo de planificación del proyecto y una puesta en marcha más rápida.
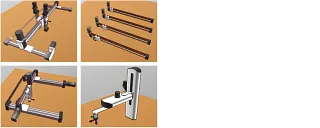
- Posibilidad de probar todas las cinemáticas de igus por adelantado en el software.
- Proyectos preprogramados para todos los robots, módulos lineales individuales y AGV de igus.
- Interfaz 3D intuitiva con simulación del robot.
Consultas
Estaré encantado de responder a sus preguntas personalmente

Consultas y envíos
En persona:
De lunes a viernes de 8:00 a 18:00h
Online:
24h