Cambiar idioma :
Kits adaptadores para robots cartesianos

- Sencillo & montaje rápido de pórtico multieje
- Para ejes de husillo y correa dentada
- Preparado para montaje de cadena portacables
- Aluminio anodizado
- Ahorro de espacio y peso
- Montaje del eje y en el eje x de 2 piezas
Servicios



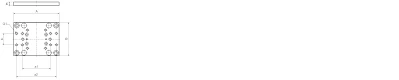
Dibujo técnico
Asignación de productos
| Referencia | Eje X | Eje Y | Función de configuración lineal del robot |
|---|---|---|---|
| AK-0011 | ZLW-0630, carro de 100 mm | ZLW-0630, carro de 100 mm | Montaje eje y |
| AK-0012 | ZLW-1040, carro de 100 mm | ZLW-0630, ZLW-1040 | Montaje eje y |
| AK-0013 | ZLW-1040, carro de 150 mm | ZLW-0630, ZLW-1040, ZLW-1080 | Montaje eje y |
| AK-0014 | ZLW-1660, carro de 250 mm | ZLW-1040, ZLW-1080 | Montaje eje y |
| AK-0024 | ZLW-1040, carro de 200 mm | ZLW-0630, ZLW-1040, ZLW-1080 | Montaje eje y |
| AK-0025 | ZLW-1080, carro de 150 mm | ZLW-0630, ZLW-1040, GRW-0630 | Montaje eje y |
Consultas
Estaré encantado de responder a sus preguntas personalmente

Consultas y envíos
En persona:
De lunes a viernes de 8:00 a 18:00h
Online:
24h