Robot trepador
manus® 2007
El objetivo de este ensayo era mantener el peso de un robot trepador a su más reducido nivel, para que el robot sea capaz, entre otras tareas, de desplazarse sobre superficies planas, tales las ventanas, mediante ventosas.
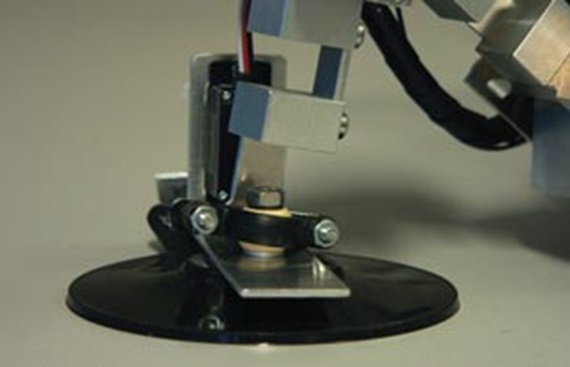
Es por ello que primero se creó un principio de aspiración gracias al cual el robot puede mantenerse sobre la ventana pasivamente, es decir sin utilizar energía. Las ventosas "pasivas" y el aparato de movimiento son montados sobre la ventana por presión y evacuados.
Para la difícil coordinación de los movimientos de cada una de las patas se utiliza los Cojinetes de pedestal igubal® libres de lubricante y muy ligeros. Cada uno pesa menos de dos gramos.
Prof. Dr.-Ing. Werner Brockmann, Universidad de Osnabrück