
Falanges impresas en 3D en un exoesqueleto
Baja fricción, ligeros y hechos a medida: componentes impresos rápidamente para aplicaciones terapéuticas
- Qué se necesitaba: Falanges para un exoesqueleto
- Método de fabricación: Sinterización selectiva por láser con polvo SLS
- Requisitos: Bajo coeficiente de fricción, resistencia al desgaste, peso reducido, precisión
- Material: iglidur I6
- Sector: Sector médico
- Beneficios para el cliente: Entrega rápida, producción rentable de piezas funcionales personalizadas
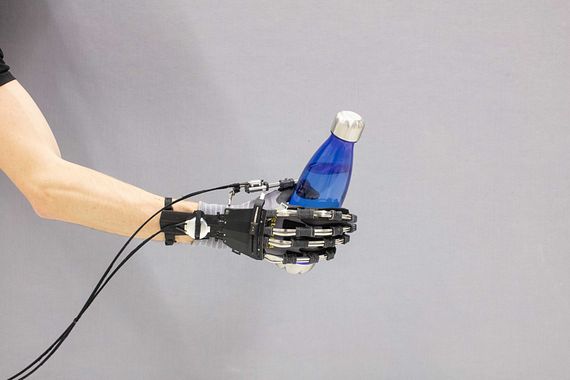
Según la Asociación Alemana de Accidentes Cerebrovasculares, una persona sufre un accidente cerebrovascular cada dos minutos en Alemania. Para facilitar el reaprendizaje del agarre tras un ictus, la Escuela Politécnica Federal de Zúrich (ETHZ) ha desarrollado una mano exoesqueleto llamada RELab tenoexo que cubre hasta el 80% de las actividades cotidianas.Las falanges impresas con el polímero de alto rendimiento iglidur I6 aseguran una óptima transmisión de la fuerza.
Más información sobre iglidur I6



Problema
La fabricación de las articulaciones de dedos con una impresora 3D clásica resultó difícil, ya que la resolución del dispositivo no era suficiente para crear la estructura necesaria de las falanges. Estos componentes no solo mantienen unidos los muelles, sino que también tienen un mecanismo de cierre detallado para una correa de cuero. La hebilla en la que se enrosca la correa es apenas más ancha que un milímetro. El filamento ABS como material de impresión resultó ser inadecuado porque la fricción entre las juntas y los muelles era demasiado alta, por lo que se perdía mucha energía.Solución
La ETH Zurich finalmente dio con iglidur I6, un plástico tribológicamente optimizado que resultó ser ideal para los componentes necesarios. El polvo SLS se ha desarrollado especialmente para reducir la fricción en las aplicaciones en movimiento. El sinterizado láser permite una alta precisión y, por tanto, hace posible crear la estructura detallada de la junta. Gracias al rápido servicio de impresión 3D de igus, las articulaciones de los dedos se fabricaron de forma rápida y rentable, y estuvieron listas para su uso inmediatamente.Estructura del exoesqueleto de la mano y su funcionamiento
El diseño de los dedos procede del profesor japonés Jumpei Arata, de la Universidad de Kyushu: tres finos muelles de acero inoxidable se colocan uno encima de otro y se conectan mediante cuatro eslabones de plástico. Un cable Bowden está unido al muelle central: si se mueve hacia delante, los dedos se cierran; si se tira hacia atrás, la mano se abre. Los motores de corriente continua estiran y flexionan los muelles y ofrecen apoyo al paciente cuando realiza movimientos de agarre. «Por dedo, el exoesqueleto puede ejercer la fuerza de seis Newton», afirma Jan Dittli, investigador del Departamento de Ciencia y Tecnología de la Salud de ETHZ. «Los tres movimientos de agarre implementados son suficientes para levantar objetos de hasta unos 500 gramos, como una botella de agua de medio litro».El exoesqueleto se ajusta mediante una muñequera con sensores y se sujeta a los dedos mediante correas de cuero. Cuando el paciente empieza a mover la mano, la muñequera transmite señales electromiográficas (EMG) a un microordenador. Este último se encuentra en una mochila junto con los motores, las baterías y la electrónica de control, por lo que la mochila está conectada al módulo manual. Si el usuario pretende realizar un movimiento de agarre, el ordenador lo detecta y activa los motores de corriente continua.
Durante el desarrollo, los investigadores se enfrentaron a un reto: las delicadas articulaciones de los dedos. Estos elementos no solo mantienen unidos los muelles, sino que también cuentan con un mecanismo de cierre detallado para la correa de cuero. La hebilla en la que se enrosca la correa es apenas más ancha que un milímetro. Para la fabricación del dorso de la mano, se utilizó una impresora 3D con un filamento ABS; el método de fabricación y el material resultaron ser inadecuados para la fabricación de las articulaciones de los dedos. «La fricción entre las juntas y los muelles habría sido demasiado alta con este material», afirma Dittli. Y añade: «Esto habría provocado que se perdiera demasiada energía al mover los dedos». La resolución de una impresora 3D normal resultó no ser lo suficientemente alta para recrear la estructura detallada de las falanges de los dedos.

iglidur I6 - el mejor plástico de impresión 3D para aplicaciones de baja fricción
La solución a este problema se encontró en la fabricación aditiva de igus. El material autolubricante FSL iglidur i6, desarrollado para la fabricación de piezas sometidas a alta fricción, demostró ser adecuado para la fabricación de las falanges. El material iglidur i6 se desarrolló originalmente para la fabricación de engranajes helicoidales para articulaciones de robots. Es ideal para la fabricación de piezas con detalles finos y superficies precisas, y es muy resistente al desgaste. iglidur i6 ha demostrado su idoneidad para piezas funcionales de larga duración en el laboratorio de pruebas de igus: una engranaje sinterizado a partir de este polímero iglidur resistente al desgaste fue probado durante dos meses en las mismas condiciones que un engranaje de POM fresado. El engranaje de POM experimentó un desgaste significativo después de 321.000 ciclos y finalmente se rompió después de 621.000 ciclos. En contraste, el engranaje iglidur i6 continuó funcionando con sólo leves señales de desgaste después de completar 1 millón de ciclos.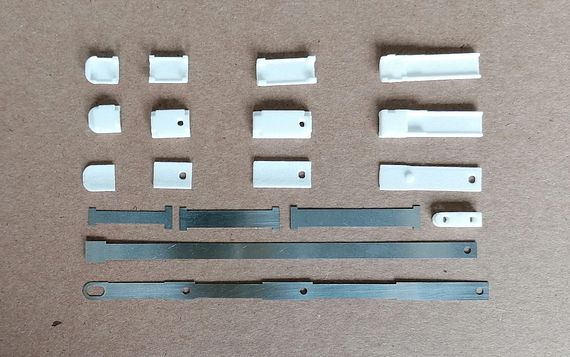
El plástico autolubricante es ideal para aplicaciones en el sector de la tecnología médica.
A diferencia del metal, iglidur I6 es muy ligero, por lo que está predestinado a utilizarse en aplicaciones en las que el bajo peso es especialmente importante. Es una ventaja importante para los investigadores del ETHZ, porque solo los exoesqueletos suficientemente ligeros y compactos son adecuados para el uso diario. Con las articulaciones de dedos hechas de iglidur I6, el módulo de la mano solo pesa 148 gramos. Los lubricantes sólidos incorporados al plástico hacen innecesaria la lubricación de los elementos y favorecen la fácil manipulación de la aplicación terapéutica avanzada.El sinterizado por láser, como método de fabricación, no solo es idóneo para reproducir geometrías complejas y estructuras delicadas, sino que también permite fabricar pequeños volúmenes y componentes únicos de forma rentable. Esto también se aplica a los exoesqueletos RELab tenoexo, ya que pueden adaptarse individualmente al paciente. «Hemos desarrollado un algoritmo que nos permite adaptar el modelo digital del exoesqueleto al tamaño de la mano del paciente con solo unos clics».

¿Prototipos rápidos o piezas funcionales rápidamente disponibles?
La velocidad permite a las empresas posicionarse mejor en el mercado y a los clientes resolver más fácilmente sus problemas, ya sea en el desarrollo de productos o en la fabricación de piezas funcionales. Subiendo el modelo 3D de las falanges requeridas a nuestro servicio de impresión 3D online, los investigadores de la ETH Zurich pueden pedir las piezas deseadas en solo unos minutos. Las piezas suelen fabricarse de un día para otro y las falanges pueden montarse unos días más tarde para que pueda comenzar la terapia. Ningún otro proceso de fabricación puede igualar la velocidad y la rentabilidad de la impresión 3D para la fabricación de series pequeñas y personalizadas.
Pero, ¿pueden las piezas impresas ser piezas funcionales en la aplicación final o deben seguir confinadas al modesto papel de prototipos rápidamente disponibles? Estamos convencidos de que nuestros materiales son suficientemente buenos. Las piezas de fabricación aditiva fabricadas con polímeros iglidur se utilizan en muchas otras aplicaciones de clientes como piezas funcionales estándar.
Pero, ¿pueden las piezas impresas ser piezas funcionales en la aplicación final o deben seguir confinadas al modesto papel de prototipos rápidamente disponibles? Estamos convencidos de que nuestros materiales son suficientemente buenos. Las piezas de fabricación aditiva fabricadas con polímeros iglidur se utilizan en muchas otras aplicaciones de clientes como piezas funcionales estándar.
Más información sobre la fabricación aditiva en igus
Aquí encontrará más ejemplos de aplicaciones con piezas impresas en 3D:
Resumen de todas las aplicaciones de los clientes
